Remote driving, or teleoperation, is the ability to control a vehicle from a distant location using a live video stream and a remote control interface. Remote driving can be used for various purposes, such as enhancing safety, convenience, and efficiency of transportation, or enabling new applications such as autonomous delivery, emergency response, or entertainment.
However, remote driving poses several technical challenges, such as ensuring low latency, high reliability, and high quality of the video stream, as well as providing a secure and user-friendly remote control interface. In this blog post, we will introduce two technologies that can help overcome these challenges: CAN and Zao SDK.
What is CAN?
CAN, or Controller Area Network, is a communication protocol that allows different devices and components in a vehicle to communicate with each other. CAN was originally developed for the automotive industry, but has since been adopted by other domains, such as industrial automation, medical equipment, and aerospace.
CAN is designed to be robust, simple, and efficient, and can operate in harsh environments with high levels of noise and interference. CAN can also support various data types, such as commands, status, diagnostics, and sensor readings.
CAN can be used to enable remote driving by allowing the remote operator to send commands to the vehicle’s actuators, such as steering, braking, and acceleration, and receive feedback from the vehicle’s sensors, such as speed, position, and orientation. CAN can also be used to monitor and control other functions of the vehicle, such as lights, doors, windows, and climate.
What is Zao SDK?
Zao SDK is a software development kit that enables ultra low latency video streaming over multiple 4G/5G networks. Zao SDK is developed by Soliton Systems, a leading provider of IT security and low latency video solutions.
Zao SDK features Soliton’s RASCOW2 streaming protocol, which is a proprietary codec that optimizes the video encoding and transmission based on the available network bandwidth and conditions. RASCOW2 can achieve near real-time streaming with ultra low latency and extreme reliability, even in challenging situations such as network congestion, packet loss, or signal degradation.
Zao SDK can be used to enable remote driving by providing a high-quality video stream from the vehicle’s camera to the remote operator’s screen, and a return data feed from the remote operator’s interface to the vehicle’s CAN bus. Zao SDK can also support multiple camera inputs, such as front, rear, side, or panoramic views, and provide a customizable interface with overlay capabilities, such as maps, indicators, or alerts.
Zao SDK can be integrated with various hardware platforms, such as NVIDIA Jetson, and can be OEM’d by automotive companies looking to implement remote driving, often as a backup for autonomous driving.
How CAN and Zao SDK Work Together?
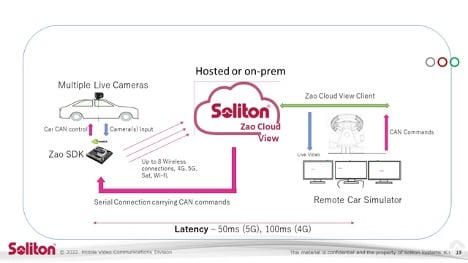
CAN and Zao SDK can work together to enable teledriving of cars by providing a seamless and secure connection between the vehicle and the remote operator. The following diagram illustrates how CAN and Zao SDK can be integrated in a remote driving system:
As shown in the diagram, the vehicle is equipped with a CAN bus, a camera, and a Zao SDK transmitter, which can be a hardware device or a software module. The Zao SDK transmitter captures the video from the camera, encodes it using RASCOW2, and transmits it over multiple 4G/5G networks to the Zao Cloud server, which can be on-premise or in the cloud. The Zao Cloud server decodes the video and sends it to the Zao Cloud View client, which can be a web browser or a dedicated application. The Zao Cloud View client displays the video on the remote operator’s screen, and also provides a remote control interface, such as a steering wheel, pedals, or buttons. The remote operator can use the interface to send commands to the vehicle, which are sent back to the Zao Cloud server, and then to the Zao SDK transmitter. The Zao SDK transmitter converts the commands into CAN messages, and sends them to the vehicle’s CAN bus, which then controls the vehicle’s actuators.
By using CAN and Zao SDK, remote driving of cars can be achieved with low latency, high reliability, and high quality, as well as with security and user-friendliness. CAN and Zao SDK can enable new possibilities and benefits for the automotive industry and the society at large.